
|
The drivexyTo Command and Two More Drawing Commands: In this activity we introduce the drivexyTo command (listed under the Robot commands tab) and two more drawing commands: stroke color and stroke width. The drivexyTo command enables you to direct the robot to drive directly to a specified (x,y) point on the grid. The stroke color and stroke width commands allow you to control the color and width when drawing lines and curves (such as when using the arc command).
|
| Grid Size: S M L | Simple View: | MinView: |
|
|
|
| Coord: x-axis y-axis | Grid Lines: x-axis y-axis | |||
| Grid: | 12x12 inches | 24x24 inches | 36x36 inches | |
| 72x72 inches | 96x96 inches | 192x192 inches | ||
| 1x1 inches | 2x2 inches | Fraction: | ||
| xy-Range: | ||||
|
|
||||
|
|
||||
| Quad: | 1 Quadrant | 4 Quadrants | 1&4 Quadrants | |
| Units: | US Customary | Metric | Ruler: | |
| Labels: |
|
|
|
|
Font
px
|
|
| Tics Lines: |
|
Width
px
|
| Hash Lines: |
|
Width
px
|
|
(
,
in
) in
|
|
 degrees
degrees
|
|
|
(
,
in
) in
|
|
|
degrees
|
|
|
(
,
in
) in
|
|
|
degrees
|
|
|
(
,
in
) in
|
|
|
degrees
|
|
|
(
,
in
) in
|
|
|
degrees
|
|
|
(
,
in
) in
|
|
|
degrees
|
|
|
(
,
in
) in
|
|
|
degrees
|
|
|
(
,
in
) in
|
|
|
degrees
|
|
|
(
,
in
) in
|
|
|
degrees
|
|
|
(
,
in
) in
|
|
|
degrees
|
|
|
(
,
in
) in
|
|
|
degrees
|
|
|
(
,
in
) in
|
|
|
degrees
|
|
|
(
,
in
) in
|
|
|
degrees
|
|
|
(
,
in
) in
|
|
|
degrees
|
|
|
(
,
in
) in
|
|
|
degrees
|
|
|
(
,
in
) in
|
|
|
degrees
|
|
|
(
,
in
) in
|
|
|
degrees
|
|
|
(
,
in
) in
|
|
|
degrees
|
|
|
|
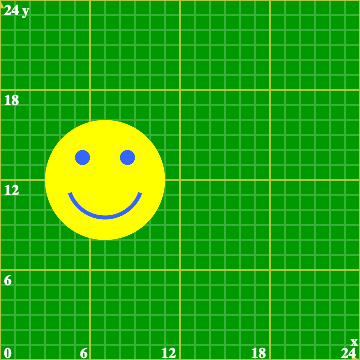
Using the circle, stroke color, stroke width, no stroke color, fill color, and arc commands, create a program that will draw a smiley face to the right of the one shown. (Use any colors you wish.) Then, using the drivexyTo, traceOn/Off, and traceColor commands, add the code that will have the robot move to the point x = 2, y = 7 (without drawing a trace) and use drivexyTo commands to draw a red rectangle around the two faces. |
|
Pre-Board Workspace
|
|||||||||||

Post-Board Workspace
|
|||||||||||