
Learning Math/CS/Engineering Design with Robotics
CSP Unit 3 Lesson 7.3
| Grid Size: S M L | Simple View: | MinView: |
|
|
|
| Coord: x-axis y-axis | Grid Lines: x-axis y-axis | |||
| Grid: | 12x12 inches | 24x24 inches | 36x36 inches | |
| 72x72 inches | 96x96 inches | 192x192 inches | ||
| 1x1 inches | 2x2 inches | Fraction: | ||
| xy-Range: | ||||
|
|
||||
|
|
||||
| Quad: | 1 Quadrant | 4 Quadrants | 1&4 Quadrants | |
| Units: | US Customary | Metric | Ruler: | |
| Labels: |
|
|
|
|
Font
px
|
|
| Tics Lines: |
|
Width
px
|
| Hash Lines: |
|
Width
px
|
1. Linkbot
|
(
,
in
) in
|
|
 degrees
degrees
|
|
Width
px
2. Linkbot
|
(
,
in
) in
|
|
|
degrees
|
|
Width
px
3. Linkbot
|
(
,
in
) in
|
|
|
degrees
|
|
Width
px
4. Linkbot
|
(
,
in
) in
|
|
|
degrees
|
|
Width
px
5. Linkbot
|
(
,
in
) in
|
|
|
degrees
|
|
Width
px
6. Linkbot
|
(
,
in
) in
|
|
|
degrees
|
|
Width
px
7. Linkbot
|
(
,
in
) in
|
|
|
degrees
|
|
Width
px
8. Linkbot
|
(
,
in
) in
|
|
|
degrees
|
|
Width
px
9. Linkbot
|
(
,
in
) in
|
|
|
degrees
|
|
Width
px
10. Linkbot
|
(
,
in
) in
|
|
|
degrees
|
|
Width
px
11. Linkbot
|
(
,
in
) in
|
|
|
degrees
|
|
Width
px
12. Linkbot
|
(
,
in
) in
|
|
|
degrees
|
|
Width
px
1. OmniBotA
|
(
,
in
) in
|
|
|
degrees
|
|
Width
px
2. OmniBotA
|
(
,
in
) in
|
|
|
degrees
|
|
Width
px
3. OmniBotA
|
(
,
in
) in
|
|
|
degrees
|
|
Width
px
4. OmniBotA
|
(
,
in
) in
|
|
|
degrees
|
|
Width
px
5. OmniBotA
|
(
,
in
) in
|
|
|
degrees
|
|
Width
px
6. OmniBotA
|
(
,
in
) in
|
|
|
degrees
|
|
Width
px
|
|
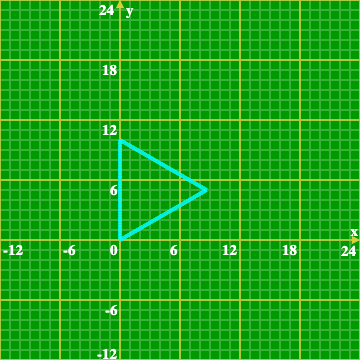
The last activity introduced the concept of commands accepting input values via a "parameter." Later on we will learn how to create our own functions that use parameters, but for this activity we will get more practice with them. Using the driveDistance command, along with either turnLeft and/or turnRight, create the code that will direct the robot to trace the path shown by the blue triangle and return to its starting position. The triangle has three equal sides of length 10. |
|
Pre-Board Workspace
|
|||||||||||

Post-Board Workspace
|
|||||||||||