
Learning Math/CS/Engineering Design with Robotics
CSP Unit 3 Lesson 5.4
| Grid Size: S M L | Simple View: | MinView: |
|
|
|
| Coord: x-axis y-axis | Grid Lines: x-axis y-axis | |||
| Grid: | 12x12 inches | 24x24 inches | 36x36 inches | |
| 72x72 inches | 96x96 inches | 192x192 inches | ||
| 1x1 inches | 2x2 inches | Fraction: | ||
| xy-Range: | ||||
|
|
||||
|
|
||||
| Quad: | 1 Quadrant | 4 Quadrants | 1&4 Quadrants | |
| Units: | US Customary | Metric | Ruler: | |
| Labels: |
|
|
|
|
Font
px
|
|
| Tics Lines: |
|
Width
px
|
| Hash Lines: |
|
Width
px
|
1. Linkbot
|
(
,
in
) in
|
|
 degrees
degrees
|
|
Width
px
2. Linkbot
|
(
,
in
) in
|
|
|
degrees
|
|
Width
px
3. Linkbot
|
(
,
in
) in
|
|
|
degrees
|
|
Width
px
4. Linkbot
|
(
,
in
) in
|
|
|
degrees
|
|
Width
px
5. Linkbot
|
(
,
in
) in
|
|
|
degrees
|
|
Width
px
6. Linkbot
|
(
,
in
) in
|
|
|
degrees
|
|
Width
px
7. Linkbot
|
(
,
in
) in
|
|
|
degrees
|
|
Width
px
8. Linkbot
|
(
,
in
) in
|
|
|
degrees
|
|
Width
px
9. Linkbot
|
(
,
in
) in
|
|
|
degrees
|
|
Width
px
10. Linkbot
|
(
,
in
) in
|
|
|
degrees
|
|
Width
px
11. Linkbot
|
(
,
in
) in
|
|
|
degrees
|
|
Width
px
12. Linkbot
|
(
,
in
) in
|
|
|
degrees
|
|
Width
px
1. OmniBotA
|
(
,
in
) in
|
|
|
degrees
|
|
Width
px
2. OmniBotA
|
(
,
in
) in
|
|
|
degrees
|
|
Width
px
3. OmniBotA
|
(
,
in
) in
|
|
|
degrees
|
|
Width
px
4. OmniBotA
|
(
,
in
) in
|
|
|
degrees
|
|
Width
px
5. OmniBotA
|
(
,
in
) in
|
|
|
degrees
|
|
Width
px
6. OmniBotA
|
(
,
in
) in
|
|
|
degrees
|
|
Width
px
|
|
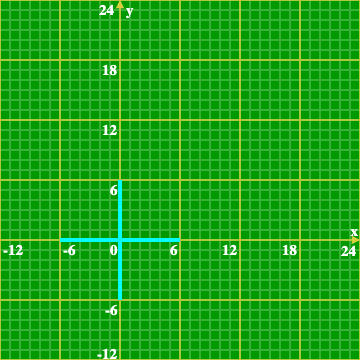
Using the turnAround function you defined in the previous exercise (pre-placed for you in the Workspace), along with the driveDistance, turnLeft(90 degrees), and traceOn commands, create the code that will have the Linkbot draw a large red + (plus) sign centered at the Linkbot's starting point. Each line of the + sign should be 12 units long (top to bottom, and left to right). The robot should only move forward, turn left, or turn around, and should end up in its starting position and orientation at the center of the + sign. Put the turnAround function definition at the end of the code. |
|
Pre-Board Workspace
|
|||||||||||

Post-Board Workspace
|
|||||||||||